Descubre cómo Diving Service junto a ASI Group, a través de la integración de propuestas innovadoras y la colaboración internacional, superaron desafíos excepcionales en la Central Hidroeléctrica Cheves (Perú), estableciéndose como lideres en operaciones subacuáticas con vehículos de operación remota (ROV).
Juan Pablo Tessada, Gerente de Operaciones de Diving Service, sabía que la filtración en uno de los túneles de la Central Hidroeléctrica Cheves, en la provincia de Oyón, Perú, sería un desafío.
Sin embargo, la combinación de tecnología avanzada, innovación y compromiso llevó al equipo a superar con éxito el desafío, estableciendo un nuevo estándar en las operaciones subacuáticas de Diving Service.
En esta entrevista, Tessada da a conocer las complejidades, los logros y las lecciones aprendidas tras el éxito de esta operación.
Cuéntenos sobre el proyecto en la Central Cheves, ¿De qué trata, cuál es el objetivo y en qué consistió el trabajo?
El trabajo nació con una inspección del túnel de aducción y la tubería de presión de la central (10 km de longitud), sin embargo, la presencia de una fisura de 1,5 cm en el cuerpo de una electroválvula ubicada en la sala de máquinas (al final del túnel), con una presión de agua de 60 bar (600 m de columna de agua), generó un cambio en los alcances del proyecto.
Al no existir otra válvula aguas arriba, que permitiera cortar el flujo para reparar la fisura encontrada, los equipos técnicos de Diving Service y ASI Group debieron diseñar una solución integral que permitiera el desmonte de la válvula afectada y la inspección de la tubería.
Ante esta situación, planteamos una solución que involucró la integración de propuestas innovadoras y la colaboración con empresas externas en dos grandes etapas.
La primera etapa consistió en dar solución al flujo constante de agua existente, producto de la fisura de la válvula. Para eso se propuso instalar un sistema de sellado exterior, consistente en un anillo envolvente, confeccionado a medida por la empresa PLIDCO en USA. Este dispositivo se instaló alrededor del cuerpo de la válvula, se aplicó torque y se rellenó el espacio interior con grasa de alta densidad, permitiendo de esta forma el sellado final de la filtración y otorgando una solución temporal al problema existente. Por otra parte, se hicieron simulaciones respecto al flujo que circulaba dentro de la tubería, ya que la ausencia de otra válvula para cortar el flujo podría representar un riesgo para la inspección.
Para superar esta limitación, se propuso la instalación de un flange ciego en el circuito para cortar el flujo. Esto requería realizar un procedimiento de hot tapping, el cual perfora la tubería desde el exterior para, posteriormente, introducir un line stop dentro de la tubería para su obturación y de esta forma detener el flujo. Gracias a esta estrategia, logramos desmontar los difusores e instalar con éxito el flange ciego, obteniendo como resultado las condiciones propicias para la segunda etapa.
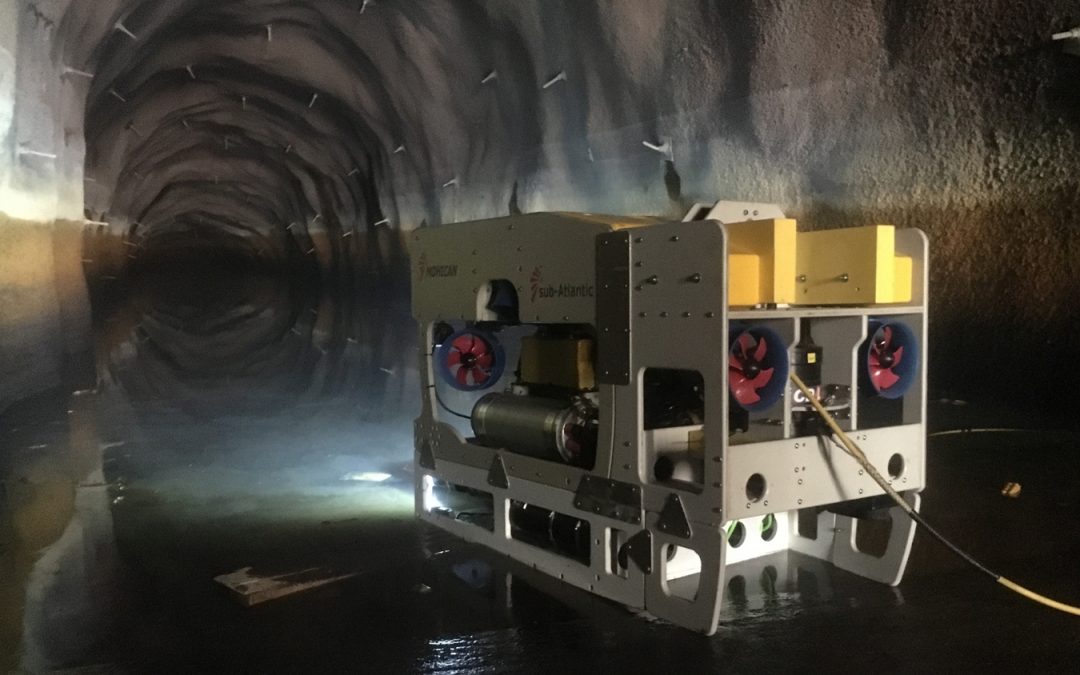
La segunda etapa se realizó con el apoyo del ROV Mohican proveniente dese Canadá y un equipo de trabajo compuesto por personal chileno, canadiense, colombiano y peruano. En esta etapa el ROV realizaría dos navegaciones al interior del túnel, la primera de ellas para, mediante sensores acústicos (sonares 2D, sonar perfilador 3D y scanner), capturar las imágenes y data necesaria para determinar la condición estructural del túnel, lo cual se pudo completar con éxito en 18 horas de navegación. La segunda navegación tenía como propósito la instalación de un tapón de 10” en la derivación de la tubería de enfriamiento en la cual se encontraba la válvula fisurada, el cual permitiría una obturación interior para realizar el desmonte de la válvula y posteriormente instalar un nuevo flange ciego en la derivación de la tubería principal. Cabe señalar que este tapón debía ser instalado a casi 10 km de distancia de la entrada del túnel y debía ser transportado por el ROV, mediante un brazo articulado que permitiera su instalación en una posición perpendicular del andar del túnel. Esta tarea también fue realizada con éxito y de acuerdo a lo planificado.
Soluciones innovadoras en operaciones subacuáticas
Durante el desarrollo del proyecto en Cheves, ¿Diving Service enfrentó algún desafío en particular? En ese caso, ¿Cómo logró el equipo superar estos obstáculos y encontrar soluciones efectivas?
El principal desafío fue generar un trabajo en conjunto, integrando la experiencia de 5 empresas, ubicadas en 5 países diferentes, con el propósito de cumplir a cabalidad los alcances del proyecto en la Central Cheves, siendo este proceso liderado por Diving Service de acuerdo un riguroso proceso de planificación, el cual permitió el cumplimiento de los objetivos y de acuerdo a los plazos establecidos.
Otro desafío significativo fue insertar el tapón en la derivación de la tubería, esto debido a que el ROV está configurado para navegar hacia adelante y hacia atrás, teniendo limitados los movimientos laterales, y el tapón debía ser instalado en 90 grados hacia la izquierda. Fue un gran desafío poder presentar el tapón para luego insertarlo pero, con la experiencia de nuestro pilotos, luego de casi de una hora y media se logró presentar el tapón y con la ayuda de la succión generada por el drenaje de la tubería desde la sala de máquina, se produjo la diferencia de presión necesaria para permitir el sellado completo y la consecuente detención del paso del agua.
Hitos y logros del proyecto en Central Cheves
La filtración en la electroválvula se debió a una fisura de 1,5 mm, con una presión de agua de 60 bar. Esto generó para Diving Service una de las operaciones subacuáticas más desafiantes y colaborativas.
En términos de logros, ¿Existió un hito específico en este proyecto que considere particularmente significativo o innovador para Diving Service?
Sin duda, la instalación del tapón resulta relevante, ya que no es un requerimiento frecuente y muy pocas empresas en el mundo pueden llevar a cabo este trabajo.
Otro hito significativo fue la ubicación de la tubería de enfriamiento, la cual estaba a casi 10 kilómetros desde el embalse. Para abordar esto, el ROV fue equipado con un brazo articulado que sostenía el tapón de 10 pulgadas. La instalación fue exitosa, ya que el tapón debía lograr un sellado total para prevenir filtraciones y, de esta forma, permitir la continuación de los trabajos.
El desafío incluyó no solo diseñar el tapón adecuadamente, sino también incorporar márgenes de holgura, ya que se carecía de planos as-built, disponiendo solo de planos de construcción, lo que representaba un desafío al poder existir diferencias significativas al momento de la ejecución.
El tapón, de 10 pulgadas, fue fabricado en acero y metales endurecidos para soportar la presión. Estaba equipado con dispositivos de flotación para compensar el peso metálico, evitando ser un peso muerto o negativo para el ROV durante la navegación de 10 kilómetros. Fue diseñado fabricado en Canadá, para posteriormente ser probado y certificado en Estados Unidos y finalmente ser instalado por Diving Service.
Una mirada hacia el futuro de las operaciones subacuáticas
En conclusión, considerando la experiencia y los resultados obtenidos en Cheves, ¿cuál es su visión respecto al futuro de proyectos similares? ¿Y qué lecciones extraídas de esta experiencia serán implementadas en futuros trabajos de Diving Service?
Desde Diving Service y junto a nuestro socio estratégico ASI Group, estamos siempre a la vanguardia de la tecnología y buscando soluciones integrales para los distintos requerimientos de nuestros clientes. Este trabajo demuestra nuestras capacidades innovadoras, para brindar soluciones integrales, más allá de las soluciones tradicionales.